No podrás conectarte si excedes diez intentos fallidos.
La Agencia SINC ofrece servicios diferentes dependiendo de tu perfil.
Selecciona el tuyo:
Cuando este miércoles el módulo Philae de la misión Rosetta se posó sobre el cometa 67P/CG, no lo hizo de golpe, sino rebotando dos veces muy lentamente por la débil gravedad. Entre el primer aterrizaje y el segundo transcurrieron casi dos horas. Después, unos minutos más tarde, la nave quedó en el lugar donde se encuentra ahora. Aunque no se dispararan sus arpones, un problema que propició los rebotes, parece que Philae y sus instrumentos funcionan correctamente.

El primer análisis de los datos del aterrizaje del módulo Philae, que ayer se desprendió del orbitador Rosetta e hizo historia al ser el primero en posarse en un cometa, sugiere que rebotó dos veces antes de establecerse en la superficie del cometa 67P/Churyumov-Gerasimenko. Así lo han señalado hoy los responsables de esta misión de la Agencia Espacial Europea (ESA).
Después del primer aterrizaje a las 15:34 (horario UTC, confirmado en la Tierra con una señal “fuerte y clara” a las 17:02h, hora peninsular española), se recibió nueva información de otros dos aterrizajes: uno a las 17:25 UTC (casi dos horas más tarde que el primero) y un tercero a las 17:32 UTC.
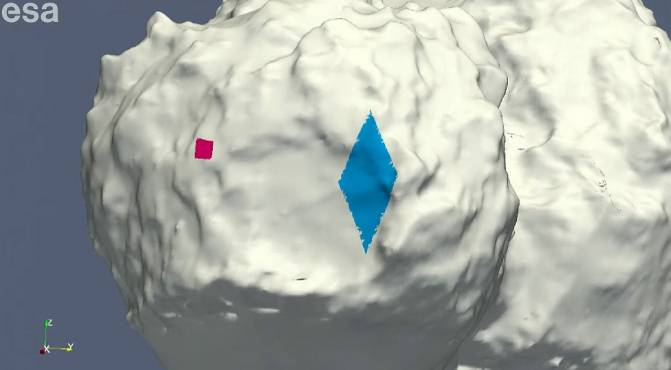
Lugar donde estaba previsto aterrizar (en rojo) y zona donde ha rebotado y ahora está Philae (en azul) sobre el cometa 67P/CG. / ESA
A pesar de estos rebotes, un incidente surgido porque los arpones de la nave no se dispararon, el módulo de aterrizaje y sus instrumentos están funcionando y enviando datos e imágenes correctamente, aunque permanezca sin anclar como estaba previsto.
“Philae está en la superficie y haciendo un trabajo maravilloso, trabajando muy bien y podemos decir que tenemos un módulo de aterrizaje muy feliz", ha destacado hoy Paolo Ferri, jefe de operaciones de la misión en el centro ESOC de la ESA.
Durante la segunda ventana de comunicación entre el ‘aterrizador’ y el orbitador establecida esta mañana entre las 07:01h y las 10:58h (hora peninsular española), "tuvimos un pase perfecto, el enlace de radio era extremadamente estable y pudimos descargar todo de acuerdo con el plan nominal", ha añadido el director de vuelo de Rosetta, Andrea Accomazzo.
Los científicos también han confirmado que la batería principal de Philae está funcionando correctamente, así como su dispositivo de memoria masiva. Por su parte, el instrumento ROMAP y otros sistemas también registraron una rotación del robot después del primer aterrizaje. Los técnicos continúan trabajando para confirmar la localización y condiciones exactas de este 'aterrizador'.
La luna Io de Júpiter tiene gran actividad volcánica desde hace 4500 millones de años. Así lo revela la proporción de isótopos de azufre y cloro en su atmósfera.
El extraño "bamboleo" que provoca en una estrella compañera ha permitido a la misión Gaia de la Agencia Espacial Europea detectar el agujero negro BH3. Con telescopios terrestres como el VLT se ha podido confirmar su masa: unas 33 veces la del Sol.




